
本文来自微信公众号:具身研习社世博官方体育app下载,作家:具身研习社世博官方体育app下载,原文标题:《自变量机器东说念主|协调框架下的具身多模态推理:让AI放下海德格尔的锤子》
当一位老到的木工执起锤子时,锤子消逝了——不是物理上的消逝,而是无需念念考便可逍遥使用。商量词,现时起初进的机器东说念主仍然无法"放下"这把“锤子”,它们被困在轮回中——识别锤子、盘算如何使用锤子,每一次交互皆需要再行"提起"器具动作认识对象,这种割裂式的惩办样子让AI永远无法达到东说念主类那种直观的器具使用田地。
具身智能的打破,不会来自对现存基于视觉-言语基础模子的修补,而将源于一场架构翻新。
自变量机器东说念主想法,必须毁灭以"多模态模块和会"为中枢的免强式范式,转向一个端到端的协调架构。该架构旨在绝抵消解视觉、言语和步履之间的东说念主为范围,将它们复兴为单一信息流进行惩办。
现时范式的根柢局限
现存主流形式将不同模态视为稳定模块,如预磨练的ViT惩办视觉信息,LLM惩办言语领悟,然后通过和会层进行蚁合。这种"委员会"式的瞎想存在着本色迤逦。
最初是表征瓶颈问题。信息在不同模态的专属编码器之间传递时,会产生不行幸免的压缩厌世,就像将一幅油画刻画给盲东说念主,再让盲东说念主向聋东说念主传达画面内容相似,每次相通皆会丢失关节的细节和商量。这种厌世遏制了模子对物理全国进行深档次的跨模态领悟。
最关节的是无法披露的问题。结构上的割裂使得模子难以学习到物理全国中擢升模态的、直观式的因果规则。就像一个东说念主无法仅通过阅读教科书就学会骑自行车相似,的确的物缄默能需要的是合座性的、具身的领悟,而不是模块化的知识拼接。
协调架构:从分治到整合
自变量机器东说念主冷落的协调模态架构源于一个中枢知悉:的确的具身智能不应该是多个成心模块的合作,而应该像东说念主类认识相似,在协调的推敲框架内同期惩办感知、推理和步履。
架构的中枢是协调示意学习。自变量机器东说念主将扫数模态信息——视觉、言语、触觉、动作——相通为分享的高维token序列,摈斥模态间的东说念主为范围。
关节打破在于摄取多任务多模态生成动作监督机制:系统必须学会从任一模态生成其他模态的内容,这迫使模子成立起深层的跨模态对应关连。
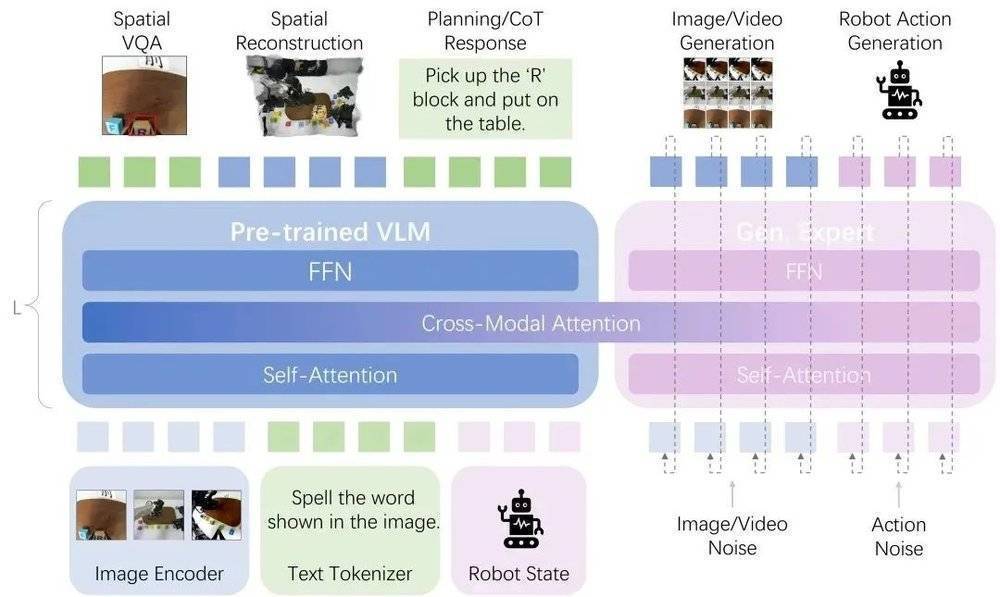
具体而言,自变量机器东说念主将扫数输入模态,包括多视角图像、文本教导与机器东说念主及时情景,通过各自的编码器转变为协调的token序列,该序列被送入一个Transformer中枢。其中,预磨练多模态领悟模子厚爱整合信息以完成空间感知领悟与任务推理盘算,而生成大家 (Gen. Expert) 则测度将来的图像与视频,以及径直生成可膨胀的机器东说念主动作。两者通过一个跨模态注办法 (Cross-Modal Attention)层深度耦合,使得感知、推理和步履的信息流在每一个推敲层皆能无损地双向交互与共同演进,从而杀青了端到端的协调学习。
这种架构杀青了具身多模态推理的披露。迎面临新任务时,系统豪爽像东说念主类相似进行合座性认识惩办——视觉领悟、语义推理、物理测度和动作盘算在协调空间内并行发生、互相影响,而非串行惩办。
通过这种端到端的协调学习,系统最终豪爽像东说念主类相似念念考和职责:不再依赖模块化的信息传递,而是在深层示意空间中径直进行跨模态的因果推理和步履方案。
披露武艺:具身多模态推理
这种协调架构旨在解锁现时模块化系统无法杀青的全方向具身多模态推理武艺。
第一个是美艳-空间推理武艺。
当东说念主类浅近画出几何体式时,机器东说念主最初通过领悟复杂几何图案,然后在协调的示意空间中进行多档次推理:将轮廓的二维图形解构为具体的字母组合,领悟这些字母的空间胪列逻辑,并推断出它们组合成的无缺单词。同期,机器东说念主豪爽将这种轮廓的美艳领悟径直转变为三维空间中的物理操作,用积木块精准地重现字母的空间排布。
扫数这个词经由体现了视觉感知、因果推理和空间操作的深度和会。
[视频演示1:机器东说念主凭证手绘制形拼出对应单词]
第二个是物理空间推理武艺。
当向机器东说念主展示积木的操作法子时,机器东说念主豪爽在其协调的潜在空间中径直进行视觉的空间逻辑推理和因果关连推演。这个经由中,机器东说念主领悟每个积木的扬弃如何影响合座结构的结实性,推断操作要领背后的工程逻辑,并测度不同操作旅途可能导致的成果。同期,机器东说念主豪爽将这种物理推理经由外化为言语念念考链,明晰地抒发其对空间关连、重力拘谨和构建政策的领悟。
最终,机器东说念主豪爽基于这种深层的物理领悟,稳定完成复杂的三维结构搭建,展现了物理直观与推理武艺的有机联接。
[视频演示2:不雅察积木操作法子并搭建对应空间体式]
第三个打破是具备推理链的自主探索武艺。
面临复杂的环境,系统豪爽整合视觉不雅察、空间操心和知识知识,构建出连贯的推理链条。扫数这个词经由体现了感知、操心、推理和步履的无缝整合,以及基于知识知识的生动方案武艺。
这种推理经由是端到端学习的当然披露。
[视频演示3:带有推理经由的物品搜索]
注:以上三个视频, 机器东说念主需要在操作中及时输出推理经由,这条目模子在协调架构中杀青物理操作、视觉和言语推理的精准同步。
终末一个展示了机器东说念主从视频中学习武艺和合作推理武艺。
当不雅察东说念主类的操作视频时,机器东说念主从视频中推断步履背后的深层意图和操办情景。这种武艺特别了简便的动作师法,体现了视频学习、对东说念主类意图的领悟、对合作操办的推断,以及自主的合作方案武艺,展现了的确的自主学习和东说念主机协同武艺。
[视频演示4:从视频中推断动作意图并自主膨胀]
结语
这些演示背后体现的是一个根人道的范式相通。
传统的多模态系统将全国判辨为稳定的表征模块,但物理全国的交互是连气儿的、及时的、多模态耦合的——当机器东说念主执取一个易碎物品时,视觉判断、力度收尾和安全测度必须同期发生,任何模块间的延长或信息厌世皆可能导致失败。咱们的协调架构恰是为知足这种具身交互的条目而生的。
这种转变的真谛在于,它让机器东说念主豪爽像海德格尔刻画的老到工匠相似,将感知、领悟和步履无缝和会。
机器东说念主不再需要履历“视觉识别→言语盘算→动作膨胀”的冗长串行惩办,而是在协调的表征空间中被径直领悟为杀青特定意图的序论——机器东说念主豪爽同期“看到”物理属性、“领悟”其在职务中的作用、“感知”操作的空间拘谨,并“盘算”相应的动作序列。
恰是这种多模态信息的并行和会惩办,使得具身多模态推理武艺得以当然披露,让机器东说念主最终豪爽像东说念主类相似涌现地与物理全邦交互。
自变量机器东说念主想法,具身智能的将来旅途是从瞎想"割裂式表征"的系统,转向构建豪爽进行的确具身多模态推理的协调系统。这并非一次增量鼎新,而是让AI具备跨模态因果推理、空间逻辑推演和杀青通用操作的具身智能所必需的架构进化。
本文来自微信公众号:具身研习社,作家:具身研习社